Research
The application was and is being developed as part of the SAVeNoW and DISRUPT research projects.
DISRUPT
The research project DISRUPT was launched at the beginning of 2024 with the aim of using a fusion of IR camera and radar information to determine the movement status of road users as accurately as possible and predict it in the near future using neuro-cognitive models. This is intended to predict possible dangerous situations and, in particular, to warn vulnerable road users (cyclists, pedestrians) and increase road safety.
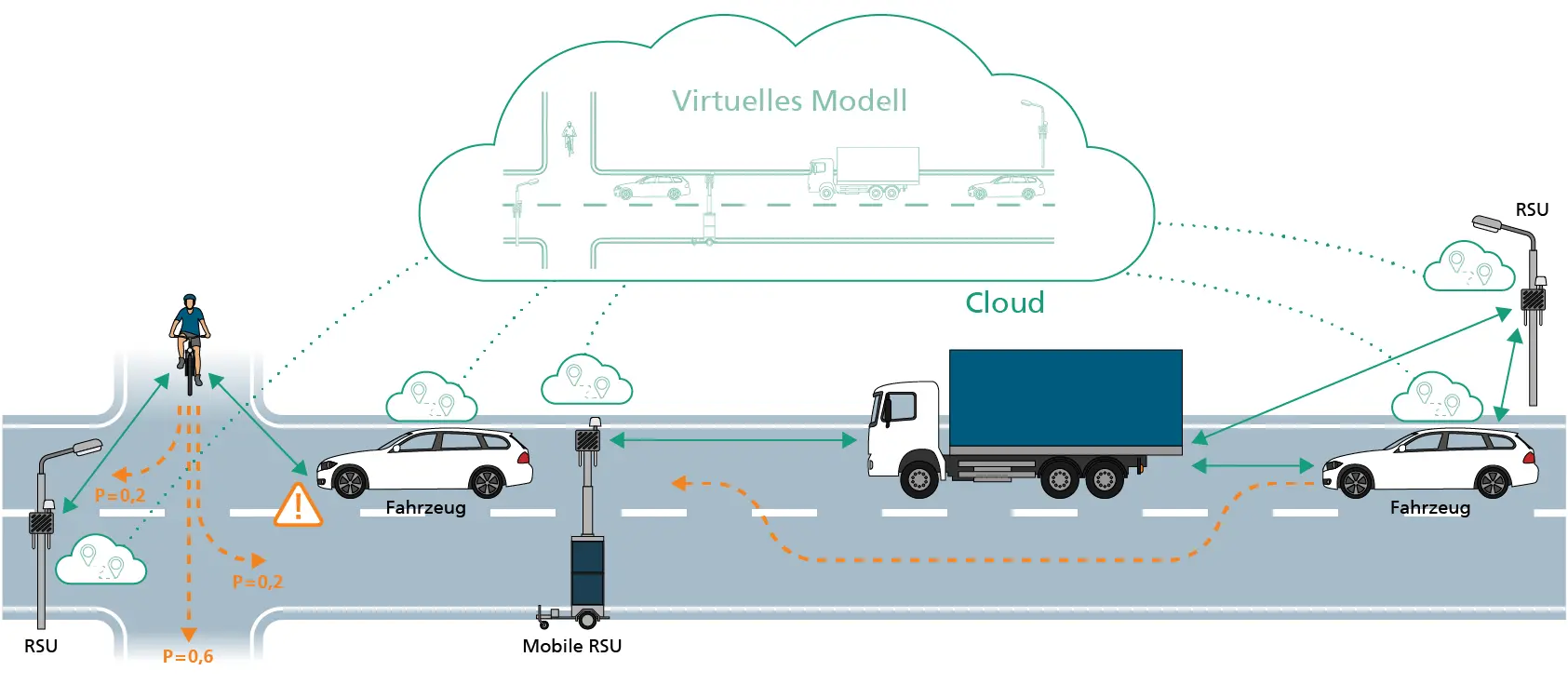
A decentralised system of mobile roadside units is used, which are designed for temporary and changing use at different locations. Flexibility and efficient data management are therefore the focus of this application.
SAVeNoW
The research project SAVeNoW explored the development and operation of a digital twin for urban traffic from 2021-2023. For this purpose, a traffic camera was installed at the "Hindenburg-/Ringlerstraße" junction in Ingolstadt and is used for traffic research.

Artificial intelligence is used to recognise and track dynamic players in the camera's field of vision. This allows the movement paths (so-called trajectories) of road users to be analysed and projected onto world coordinates. The recognised road users and statistics can be viewed in the publicly accessible dashboard: Forschungskreuzung

